Signaler une erreur
Mathématiques - Réviser le cours
Calcul vectoriel
Mathématiques - Réviser le cours
Calcul vectoriel
Imprimer
Mathématiques - Réviser le cours
Calcul vectoriel
Mathématiques - Réviser le cours
Calcul vectoriel
L'essentiel du cours
La somme de deux vecteurs est un vecteur que l'on peut construire de deux façons :
– avec la relation de Chasles en partant d'un point ;
;
– avec la relation de Chasles en partant d'un point
;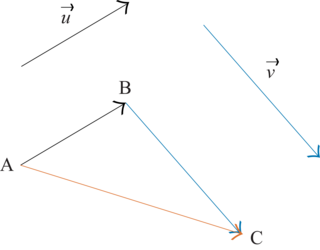 |
– avec la règle du parallélogramme :  .
.
.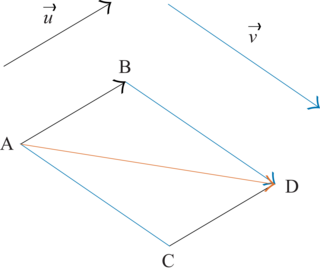 |
Remarque
La relation de Chasles sert aussi à décomposer un vecteur en une somme de vecteurs.Si A et B sont deux points donnés, alors, pour tout point C, on a :
 .
.On définit la multiplication d'un vecteur par un réel de la manière suivante. Soit
 un vecteur non nul et k un nombre réel non nul, le vecteur
un vecteur non nul et k un nombre réel non nul, le vecteur  est défini ainsi :
est défini ainsi :–
 a la même direction que
a la même direction que  .
.Définition 1 : Soit
 et
et  deux vecteurs du plan. On dit que les vecteurs
deux vecteurs du plan. On dit que les vecteurs  et
et  sont une base du plan si et seulement si
sont une base du plan si et seulement si  et
et  ne sont pas colinéaires.
ne sont pas colinéaires.Définition 2 : Soit
 et
et  deux vecteurs du plan. Le déterminant des vecteurs
deux vecteurs du plan. Le déterminant des vecteurs  et
et  est le réel a × c − b × d. On le note
est le réel a × c − b × d. On le note  .
.Propriété 1 : Soit
 et
et  deux vecteurs du plan.
deux vecteurs du plan.  et
et  sont colinéaires si et seulement si
sont colinéaires si et seulement si  .
.Propriété 2 : Soit A(xA;yA) et B(xB;yB) deux points du plan.
Le milieu du segment [AB] est le point M dont les coordonnées sont
 .
.Propriété 3 : Si A et B sont deux points de coordonnées respectives (xA;yA) et (xB;yB), alors on a tout naturellement :
 .
.Définition : Soit un point M est un point extérieur à une droite (d). On dit que le point N de la droite (d) est le projeté orthogonal du point M sur la droite (d) lorsque les droites (MN) et (d) sont perpendiculaires.
Représentations et méthodes
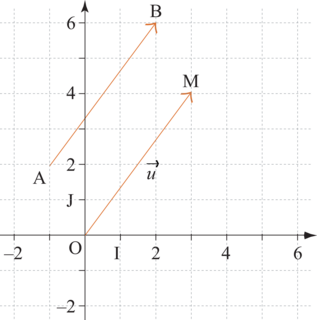
Dans un plan muni d'un repère  , à tout vecteur
, à tout vecteur  est associé un unique point M tel que
est associé un unique point M tel que  , le point est l'image de l'origine O du repère par la translation de vecteur
, le point est l'image de l'origine O du repère par la translation de vecteur  .
.
Par définition, les coordonnées de sont celles de M : si M a pour coordonnées (x;y), le vecteur
sont celles de M : si M a pour coordonnées (x;y), le vecteur  a pour coordonnées (x;y), on écrit
a pour coordonnées (x;y), on écrit  ou aussi
ou aussi  .
.
Par exemple, sur le dessin ci-dessous on a : .
.
, à tout vecteur est associé un unique point M tel que , le point est l'image de l'origine O du repère par la translation de vecteur .Par définition, les coordonnées de
sont celles de M : si M a pour coordonnées (x;y), le vecteur a pour coordonnées (x;y), on écrit ou aussi .Par exemple, sur le dessin ci-dessous on a :
. |
Il en découle que deux vecteurs  et
et  sont égaux si et seulement s'ils ont les mêmes coordonnées :
sont égaux si et seulement s'ils ont les mêmes coordonnées :  et
et  .
.
Il est facile de calculer les coordonnées d'un vecteur quelconque à partir des coordonnées des points A et B. Dans un repère du plan, soit A un point de coordonnées (xA;yA) et B un point de coordonnées (xB;yB), alors le vecteur
quelconque à partir des coordonnées des points A et B. Dans un repère du plan, soit A un point de coordonnées (xA;yA) et B un point de coordonnées (xB;yB), alors le vecteur  a pour coordonnées (xB − xa ; yB − ya).
a pour coordonnées (xB − xa ; yB − ya).
Soit et
et  deux vecteurs de coordonnées
deux vecteurs de coordonnées  et
et  , alors :
, alors :
et sont égaux si et seulement s'ils ont les mêmes coordonnées : et .Il est facile de calculer les coordonnées d'un vecteur
quelconque à partir des coordonnées des points A et B. Dans un repère du plan, soit A un point de coordonnées (xA;yA) et B un point de coordonnées (xB;yB), alors le vecteur a pour coordonnées (xB − xa ; yB − ya).Soit
et deux vecteurs de coordonnées et , alors :- la somme de deux vecteurs
 et
et  est un vecteur
est un vecteur  qui a pour coordonnées
qui a pour coordonnées  ;
; - le produit d'un vecteur
 par un réel k est un vecteur
par un réel k est un vecteur  qui a pour coordonnées (kx;ky).
qui a pour coordonnées (kx;ky).
Signaler une erreur
Mathématiques - Réviser le cours
Calcul vectoriel
Mathématiques - Réviser le cours
Calcul vectoriel
Imprimer
Mathématiques - Réviser le cours
Calcul vectoriel
Mathématiques - Réviser le cours
Calcul vectoriel